
非線形機械システムや環境システムのモデリングと制御
機械システムが高度化するにつれて,平衡状態近傍だけでなく物理的限界まで陽に考慮した解析や制御が必要になってきています.また,複雑な環境システムの精密な解析と制御に対するニーズも高まっています.これらの課題を解決するために,解析や制御に適した数理モデルの構築と制御応用に取り組んでいます.たとえば以下のようなシステムを対象とした研究を行っています.
- ホバークラフトの制御実験 [Movie]
- 4輪車両のドリフト走行実験,衝突回避制御
- テザー衛星の伸展回収制御
- 鉄道車両の振動制御
- 鉄鋼プロセスにおける冷間圧延の制御・鋼板冷却制御
- 熱流体現象の制御
- エレベータドアの外乱推定
- 空調装置のモデリングと制御
- 血糖値や免疫系のモデリングと制御
- 下水処理施設の制御
- 実時間価格制度(リアルタイムプライシング)による電力需要誘導
- 浮体式洋上風力発電設備のモデリングと制御
- 自由運動を活用した歩行ロボット [Movie]
- ドローンの追従回避制御や耐故障制御 [Movie]
図:テザー衛星
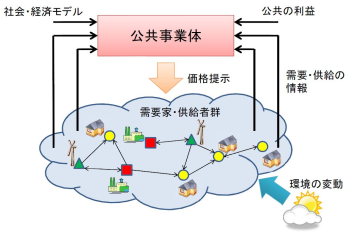
図:電力網の需要誘導
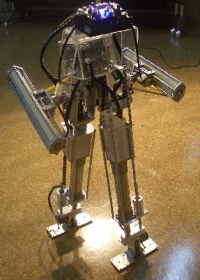
図:歩行ロボット
■キーワード
機械システム,生体システム,環境システム,社会システム
参考文献
- 氷野康平, 橋本智昭, 大塚敏之: タイヤ力の飽和と荷重移動を伴う四輪車両の非線形モデル予測制御, 計測自動制御学会論文集, Vol. 50, No. 5, pp. 432-440 (2014) DOI:10.9746/sicetr.50.432
- M. Okazaki, and T. Ohtsuka: Switching Control for Guaranteeing the Safety of a Tethered Satellite, Journal of Guidance, Control, and Dynamics, Vol. 29, No. 4, pp. 822-830 (2006) DOI:10.2514/1.16552
- 尾崎昂平, 大塚敏之, 藤本健治, 北村章, 中山万希志: 板速可変な冷間圧延機における板厚と張力の非線形Receding Horizon制御, 鉄と鋼, Vol. 96, No. 7, pp. 459-467 (2010) DOI:10.2355/tetsutohagane.96.459
- 大西彰, 大塚敏之: 高度下水処理における生物反応モデルASM3+Bio-Pを利用した非線形モデル予測制御, システム制御情報学会論文誌, Vol. 28, No. 1, pp. 1-11 (2015) DOI:10.5687/iscie.28.1
- 亀本大貴, 橋本智昭, 加嶋健司, 大塚敏之: モデル予測制御に基づいた実時間価格制度による電力系統の負荷周波数制御, システム制御情報学会論文誌, Vol. 27, No. 10, pp. 405-411 (2014) DOI:10.5687/iscie.27.405
- 森田晋, 大塚敏之: コンパス型歩行モデルの力学的対称性に基づく歩容生成, 計測自動制御学会論文集, Vol. 40, No. 5, pp. 509-517 (2004) DOI:10.9746/sicetr1965.40.509
- S. Morita, H. Fujii, T. Kobiki, S. Minami, and T. Ohtsuka: Gait Generation Method for a Compass Type Walking Machine Using Dynamical Symmetry, Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2825-2830 (2004) DOI:10.1109/IROS.2004.1389837
- 里内亮, 河野佑, 大塚敏之: 粒子フィルタによる需要家推定を用いた実時間価格制度, 計測自動制御学会論文集, Vol. 53, No. 8, pp. 463-472 (2017) DOI:10.9746/sicetr.53.463
- 上野和浩, 山田雅貴, 羽田絢, 中條俊樹, 大塚敏之: 強風下の浮体式洋上風力発電におけるブレード曲げ応力の変動抑制を目的とする非線形モデル予測制御, 計測自動制御学会論文集, Vol. 54, No. 2, pp. 156-166 (2018) DOI:10.9746/sicetr.54.156
- K. Hirota, Y. Satoh, N. Motooka, Y. Asano, S. Kameoka, and T. Ohtsuka: Nonlinear Receding-Horizon Differential Game between a Multirotor UAV and a Moving Object, Proceedings of the 2017 Asian Control Conference, pp. 2137-2142 (2017) DOI:10.1109/ASCC.2017.8287505
- Y. Aoki, Y. Asano, A. Honda, N. Motooka, and T. Ohtsuka: Nonlinear Model Predictive Control of Position and Attitude in a Hexacopter with Three Failed Rotors, Proceedings of the 6th IFAC Conference on Nonlinear Model Predictive Control, pp. 262-267 (2018) DOI:10.1016/j.ifacol.2018.11.018