
Modeling and Control of Various Nonlinear Systems
As mechanical systems become more sophisticated, methodologies are needed to analyze and control them in the neighborhood of an equilibrium point and also to take their physical limits explicitly into account. Moreover, complicated environmental systems increasingly need to be precisely analyzed and controlled. To solve practical problems in various fields, we work on mathematical modeling, analysis, and control of various systems, as follows.
- Control experiment of a hovercraft [Movie]
- Drift motion and collision avoidance of four-wheeled vehicles
- Deployment and retrieval of tethered satellites
- Active suspension for rail vehicles
- Control of cold tandem mills and plate cooling in steel-making processes
- Control of thermofluid systems
- Disturbance estimation in elevator doors
- Modeling and control of air conditioners
- Modeling and control of blood glucose levels and immune systems
- Modeling and control of wastewater treatment plants
- Modeling and control of electric power demand by real-time pricing
- Modeling and control of floating offshore wind turbines
- Walking robots exploiting free motion [Movie]
- Target tracking, obstacle avoidance, and fault-tolerant control of multirotor UAVs [Movie]
Figure: A tethered satellite.
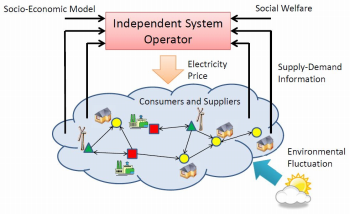
Figure: Control of electric power demand.
Figure: A walking robot.
■ Keywords
Mechanical systems, Biological systems, Environmental systems, Social systems.
References
- K. Hino, T. Hashimoto, and T. Ohtsuka: Nonlinear Model Predictive Control for Four-Wheeled Vehicle with Saturation of Tire Forces and Load Transfers, Transactions of the Society of Instrument and Control Engineers, Vol. 50, No. 5, pp. 432-440 (2014) (in Japanese) DOI:10.9746/sicetr.50.432
- M. Okazaki, and T. Ohtsuka: Switching Control for Guaranteeing the Safety of a Tethered Satellite, Journal of Guidance, Control, and Dynamics, Vol. 29, No. 4, pp. 822-830 (2006) DOI:10.2514/1.16552
- K. Ozaki, T. Ohtsuka, K. Fujimoto, A. Kitamura, and M. Nakayama: Nonlinear Receding Horizon Control of Thickness and Tension in a Tandem Cold Mill with a Variable Rolling Speed, ISIJ International, Vol. 52, No. 1, pp. 87-95 (2012) DOI:10.2355/isijinternational.52.87
- A. Onishi, and T. Ohtsuka: Nonlinear Model Predictive Control for an Enhanced Wastewater Treatment Plant Using ASM3+Bio-P, Transactions of the Institute of Systems, Control and Information Engineers, Vol. 28, No. 1, pp. 1-11 (2015) (in Japanese) DOI:10.5687/iscie.28.1
- H. Kamemoto, T. Hashimoto, K. Kashima, and T. Ohtsuka: Model Predictive Control Based Real-Time Pricing for Load Frequency Control in Electric Power Systems, Transactions of the Institute of Systems, Control and Information Engineers, Vol. 27, No. 10, pp. 405-411 (2014) (in Japanese) DOI:10.5687/iscie.27.405
- S. Morita, and T. Ohtsuka: Gate Generation of a Compass Type Walking Model Based on Dynamical Symmetry, Transactions of the Society of Instrument and Control Engineers, Vol. 40, No. 5, pp. 509-517 (2004) (in Japanese) DOI:10.9746/sicetr1965.40.509
- S. Morita, H. Fujii, T. Kobiki, S. Minami, and T. Ohtsuka: Gait Generation Method for a Compass Type Walking Machine Using Dynamical Symmetry, Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2825-2830 (2004) DOI:10.1109/IROS.2004.1389837
- R. Satouchi, Y. Kawano, and T. Ohtsuka: Real-Time Pricing with Consumers Estimation by a Particle Filter, Transactions of the Society of Instrument and Control Engineers, Vol. 53, No. 8, pp. 463-472 (2017) (in Japanese) DOI:10.9746/sicetr.53.463
- K. Ueno, M. Yamada, K. Haneda, T. Chujo, and T. Ohtsuka: Nonlinear Model Predictive Control for Suppressing Variation of Blade Bending Stress in Floating Offshore Wind Power Generation under Strong Wind, Transactions of the Society of Instrument and Control Engineers, Vol. 54, No. 2, pp. 156-166 (2018) (in Japanese) DOI:10.9746/sicetr.54.156
- K. Hirota, Y. Satoh, N. Motooka, Y. Asano, S. Kameoka, and T. Ohtsuka: Nonlinear Receding-Horizon Differential Game between a Multirotor UAV and a Moving Object, Proceedings of the 2017 Asian Control Conference, pp. 2137-2142 (2017) DOI:10.1109/ASCC.2017.8287505
- Y. Aoki, Y. Asano, A. Honda, N. Motooka, and T. Ohtsuka: Nonlinear Model Predictive Control of Position and Attitude in a Hexacopter with Three Failed Rotors, Proceedings of the 6th IFAC Conference on Nonlinear Model Predictive Control, pp. 262-267 (2018) DOI:10.1016/j.ifacol.2018.11.018